Viomi V2 über Windows
Linux-Distro auf Windows installieren:installieren
Powershell (Standard Ubuntu Installation):
wsl --installUSBIPD installieren, um USB auf WSL umzuleiten: https://learn.microsoft.com/de-de/windows/wsl/connect-usb
usbipd list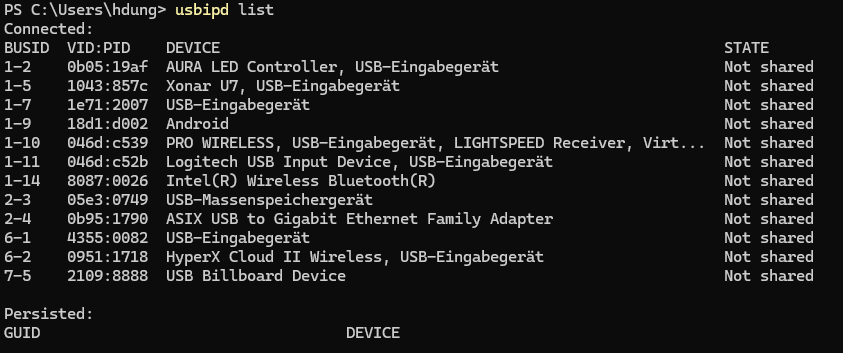
Hier Android=Viomi V2 freigeben:
Freigabe mit Adminrechten:
usbipd bind --busid 1-9
Bind an geöffnete WSL-InstanzL:
usbipd attach --wsl --busid 1-9
Unbind (falls nötig):
usbipd detach --busid 1-9
In WSL-Konsole testen:
lsusb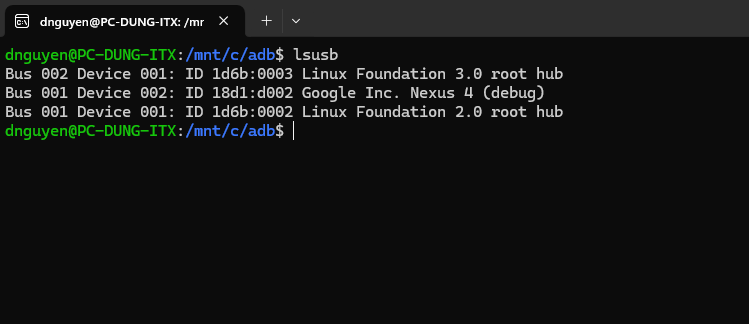
Viomi V2 root
adb installieren:
sudo apt install adb
Verbindung zu Viomi V2 testen:
adb shell
Kein login erforderlich bei mir. Ansonsten Anleitung hier folgen um ADB auf Viomi zu aktivieren:
https://github.com/Hypfer/valetudo-crl200s-root
Backups erstellen (davor adb exit):
adb pull /proc/partitions
adb pull /dev/nanda
adb pull /dev/nandb
adb pull /dev/nandc
adb pull /dev/nandd
adb pull /dev/nande
adb pull /dev/nandf
adb pull /dev/nandg
adb pull /dev/nandh
adb pull /dev/nandi
Firmware package erstellen und danach auf Emails warten / :
https://builder.dontvacuum.me/
Verzeichnisse in Windows erstellen und Alle Daten in der Email downloaden,
zB. C:\adb\firmware
Firmware pushen:
cd /mnt/c/adb/firmware
adb push ./viomi.vacuum.v6_fw.tar.gz /tmp/
Aktuelle Valetudo binary downloaden:
https://github.com/Hypfer/Valetudo/releases/latest/download/valetudo-armv7.upx
Valetudo binary pushen:
cd /mnt/c/adb/valetudo
adb push ./valetudo-armv7.upx /mnt/UDISK/valetudo
Skript 'convert-robot.sh' downloaden:
https://github.com/Hypfer/valetudo-crl200s-root/blob/master/convert-robot.sh
Skript pushen:
cd /mnt/c/adb/
adb push ./convert-robot.sh /tmp/
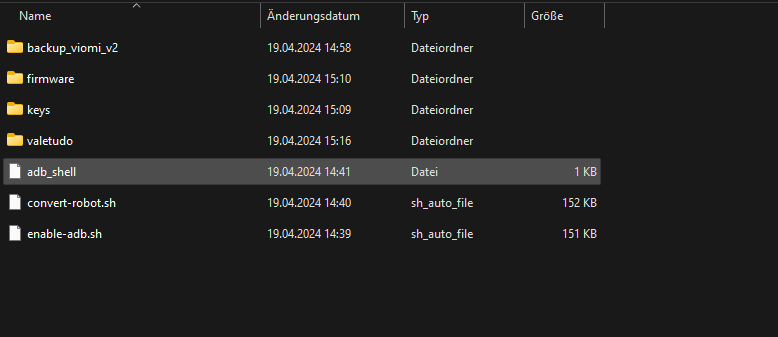
Meine Verzeichnis-Struktur:
Valetudo installieren:
ADB zu viomi:
adb shell
Valetudo installieren:
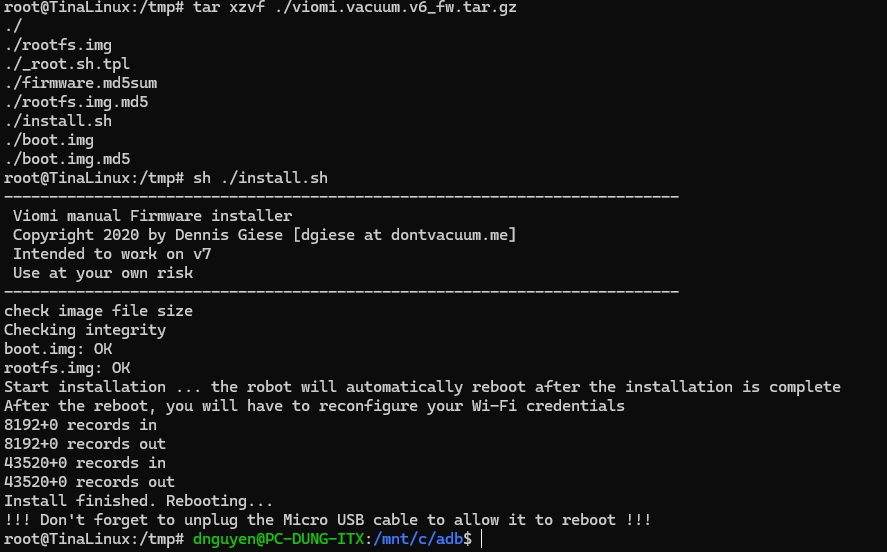
cd /tmp/
sh ./convert-robot.sh
tar xzvf ./viomi.vacuum.v6_fw.tar.gz
sh ./install.shErfolgreiche Installation: